
Autonomous Humanoid Figure(AHF)Hatsuki
Autonomous Humanoid Figure(AHF)とは、AI技術xロボティックス技術xアニメ文化の融合により、 動きの美、知能表現など今までのない感動の新世代フィギュアである。 Autonomous (自律) はAI、動く技術を意味する。 Humanoid(人型)は人間の形に似る存在を意味する。
AHFは様々な先端技術を利用し、日本アニメ的な表現を融合した自律人型エンタテイメントインターフェイスである。

The Autonomous Humanoid Figure (AHF) is a new generation of figures that has unprecedented characteristics, such as the beauty of movement, expressions and intelligence, achieved through the fusion of AI technology x robotics technology x Japanese animation culture.
Autonomous is Artificial Intelligence, a Humanoid is an entity that resembles a human, a Figure is an entity an embodiment of beauty,
As a showcase of AHF, we present Hatsuki

Research Overview
We are inspired by the the Japanese Otaku Culture (Anime, Manga, Video games…etc), where characters of such culture have unique design attributes and novel interactions. Despite the worldwide popularity of the otaku culture, robotics research remain industry-focused, emphasizing medical and industrial applications and contexts.

Inspired by the Japanese anime characters, we present Hatsuki, the first humanoid robot that embodies anime-character designs in terms of aesthetic design, facial expressions, auditory communication and interactions beyond all previous efforts. Hatsuki can be deployed in numerous application domains, from entertainment to house-hold and service industries.
Realizing Hatsuki requires overcoming multidisciplinary and interconnected research challenges in the mechanical design, teleoperation, artificial intelligence, robot-control, human-robot interaction to name a few. Accordingly, our team includes researchers, designers and artists from varied disciplines, where our joint efforts help realize our vision of AHF Hatsuki.

Hatsuki
Hatsuki was first presented in at the conference RO-MAN, where most existing robotics research focus on generating task-efficient motions, yet these motions tend to be startling, scary or repellent to surrounding users. Therefore, we propose a motion generation method for humanoid robots which is based on procedural animation with inverse-kinematics (IK) rig methods, commonly used in video games and computer graphics (CG). The resulting animations are task-efficient, adjustable in real time, and user-friendly.

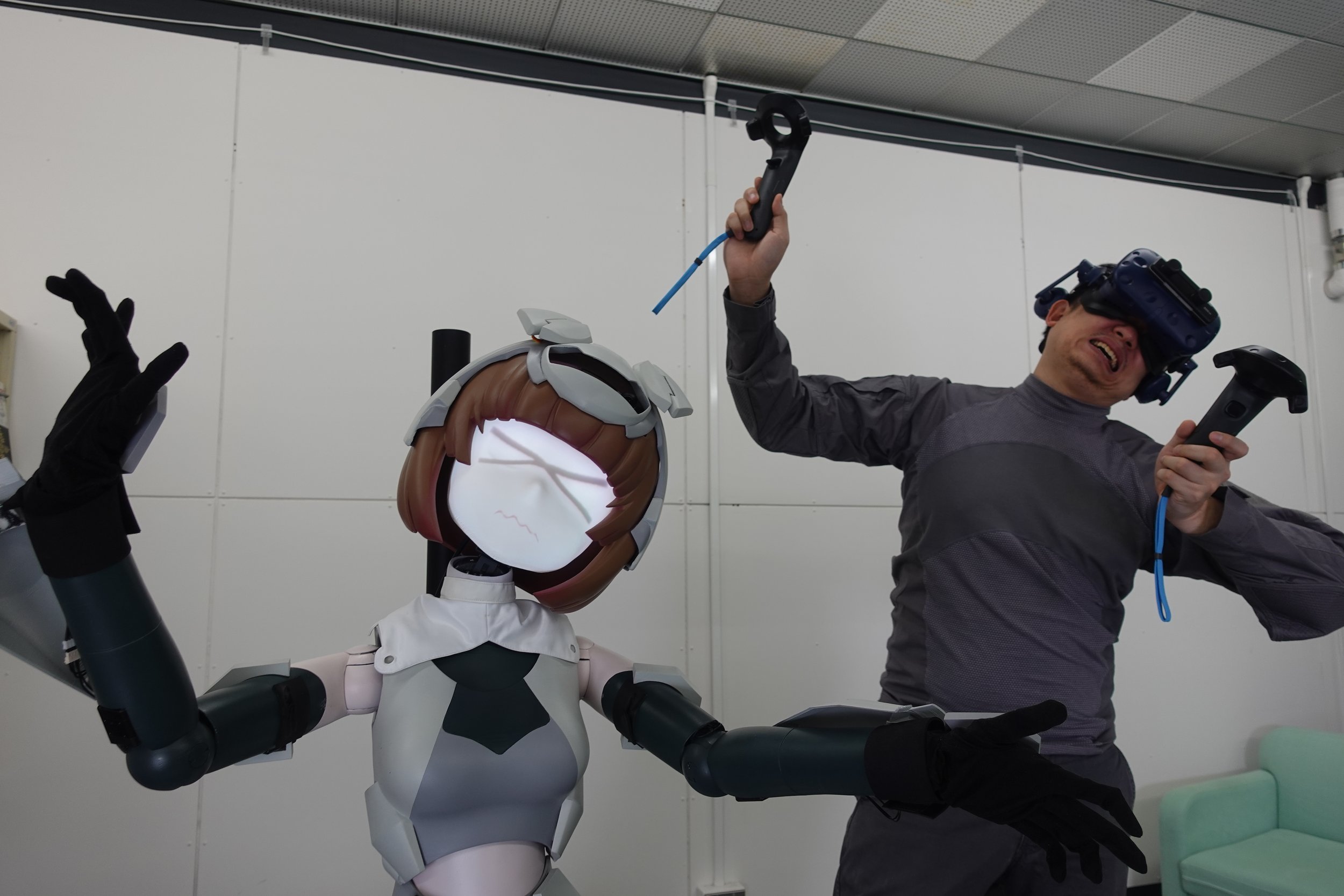
Hatsuki as an Avatar System for Seiyu
Most existing robotics research focus on generating task-efficient motions, yet these motions tend to be startling, scary or repellent to surrounding users. Therefore, we propose a motion generation method for humanoid robots which is based on procedural animation with inverse-kinematics (IK) rig methods, commonly used in video games and computer graphics (CG). The resulting animations are task-efficient, adjustable in real time, and user-friendly.
Towards Creating Beautiful and Efficient Robot Motions
Most existing robotics research focus on generating task-efficient motions, yet these motions tend to be startling, scary or repellent to surrounding users. Therefore, we propose a motion generation method for humanoid robots which is based on procedural animation with inverse-kinematics (IK) rig methods, commonly used in video games and computer graphics (CG). The resulting animations are task-efficient, adjustable in real time, and user-friendly.
Events and Exhibitions

“Hello World” Performance at CHI 2022
We broadcasted a performance that introduced Hatsuki to the world with her creator “Hakase” at CHI 2021. The performance aims at showing the potential of using anime-based entertainment robots, operated by anime-voice actress “Seiyu”, to deliver unique interactions and performances leveraging the Japanese anime culture. Check out the video to see the full performance (with English subtitles)
このロボットがすごい!-This robot is “Sugoi”
Hatsuki was featured in the event “ このロボットはすごい!” where Koma Yang, the founder of the cutieroid project, presented the story of Hatsuki; discussing the challenges of creating Hatsuki, how it was inspired, fabricated and deployed at various exhibitions.
-
![Hatsuki recently debuted as the first Mecha VTuber!]()
Hatsuki as the first Mecha VTuber!
Hatsuki has recently debuted on her own Youtube channel as the first Mecha Vtuber! check out her channel here.
Unlike traditional Vtubers who only have a digital embodiment, Hatsuki is unique as she has both a digital embodiment as a Vtuber, and a real physical embodiment as a humanoid robot!
-
![Hatsuki was demonstrated at Wonder Festival 2022 (WonFes2022) at Makuhari messe. Hatsuki was demonstrated at Hatsumuv's booth.]()
Hatsuki at Wonder Festival 2022
Hatsuki was demonstrated at Wonder Festival 2022, which is the worlds largest anime-figurine convention! Hatsuki was teleoperated by a Seiyu (anime voice actress), who brought Hatsuki to life through entertaining interactions and conversations with visitors of Hatsumuv’s booth.
-
![Hatsuki is featured at MoguLive as the first Robotic VTuber!]()
Hatsuki is featured at MoguLive
Hatsuki’s youtube debut is featured by MoguLive!
Hatsuki is the first humanoid robot with anime-like character design and expressions, which can be used for a variety of entertainment performances.
Article Link (Japanese): Here




Project Publications
Pin-Chu Yang, Satoshi Funabashi, Mohammed Al-Sada and Tetsuya Ogata, "Generating Humanoid Robot Motions based on a Procedural Animation IK Rig Method," 2022 IEEE/SICE International Symposium on System Integration (SII), 2022, pp. 491-498,
PIN-CHU YANG, Mohammed Al-Sada, Chang-Chieh Chiu, Kevin Kuo, Tito Pradhono Tomo, Kanata Suzuki, Nelson Enrique Yalta Soplin, Kuo-Hao Shu, and Tetsuya Ogata: HATSUKI : An anime character like robot figure platform with anime-style expressions and imitation learning based action generation, Proceeding of the 29th IEEE International Conference on Robot and Human Interactive Communication (Ro-Man 2020), Online, Aug 31-Sept 4, 2020.
DOI: 10.1109/SII52469.2022.9708820. (Download)
Mohammed Al-Sada, Pin-Chu Yang, Chang Chieh Chiu, Tito Pradhono Tomo, Mhd Yamen Saraiji, Tetsuya Ogata, and Tatsuo Nakajima. 2021. From Anime To Reality: Embodying An Anime Character As A Humanoid Robot. Extended Abstracts of the 2021 CHI Conference on Human Factors in Computing Systems. Association for Computing Machinery, New York, NY, USA, Article 176, 1–5.
ゲームエンジンを使用したロボット模倣学習を効率化するプラットフォーム開発: Autonomous Humanoid Figure “Hatsuki” Mk.I.
作者:陽 品駒, 鈴木 彼方, 邱 章傑, トモ ティト プラドノ, ヤルタ ネルソン, カク ケビン, 舒 國豪, 尾形 哲也
Credits
Dr. Pin-Chu (Koma) Yang , Cutieroid Project. Hatsumuv. Waseda University, Tokyo, Japan
Mohammed Al-Sada, Cutieroid Project, Hatsumuv, Tokyo, Japan. Waseda University, Tokyo, Japan. Qatar University, Doha, Qatar.
Dr. Tito Pradhono Tomo, Cutieroid Project, Tokyo, Japan. Waseda University, Tokyo, Japan.
Dr. Satoshi Funabashi, Hatsumuv, Tokyo, Japan. Waseda University, Tokyo, Japan.
Mr. Kanata Suzuki, Fujitsu Laboratories LTD, Japan.
Mr. Kuo-Hao Shu, Cutieroid Project, Tokyo, Japan.
Dr. Nelson Soplin, Cutieroid Project, Tokyo, Japan. Hitachi Ltd, Japan.
Mr. Chang-Chieh Chiu, Cutieroid Project, Tokyo, Japan.
Mr. Kevin Kuo, Cutieroid Project, Hatsumuv, Tokyo, Japan.
Dr. Mhd Yamen Saraiji, Avatarin, Tokyo, Japan.
Prof. Tastuo Nakajima, Waseda University, Tokyo, Japan.
Prof. Tetsuya Ogata, Waseda University, Tokyo, Japan.
Business Inquiries
If you are interested in deploying Hatsuki at an event, or to develop your own anime-inspired humanoid robot, do not hesitate to reach out to Hatsumuv!
Hatsumuv is a recently established startup providing various services related to anime-inspired humanoid robots, just like Hatsuki. Click here to go to Hatsumuv’s website.

